Good evening, I bought a boombox to control my arduino based robot. I have always used the midi translator pro on pc and it has always worked well. I wanted to use the boombox to do without the pc. the problem is that i can’t assign the serial port on the bomebox. on my mac the arduino is recognized with the name of /dev/cu.usbmodem14401 while on the bomebox with the name of /dev/ttyACM0. Well. I created a serial port on the translator pro called RobotSerial . i can assign /dev/ttyACM0 on the boom box to RobotSerial when i’m on serialport, however when i go to MIDIports i can’t assign anything to RobotSerial it stays in pending state. in another project I had the possibility to assign MIDIports to an alias "/dev/cu.usbmodem14401 " which however did not work because from the bomebox the name of the serial is /dev/ttyACM0 . i am confused .where should i intervene on bomebox or translator pro on mac? n.b. I also used dehli hub to connect the serial to the bomebox. maybe the hubs I have are not good? any model to recommend? Thank you
Hi, in BomeBox there is a Serial Ports page that you can assign serial port aliases similar to how you assign aliases on MIDI Ports page. Have you tried that.
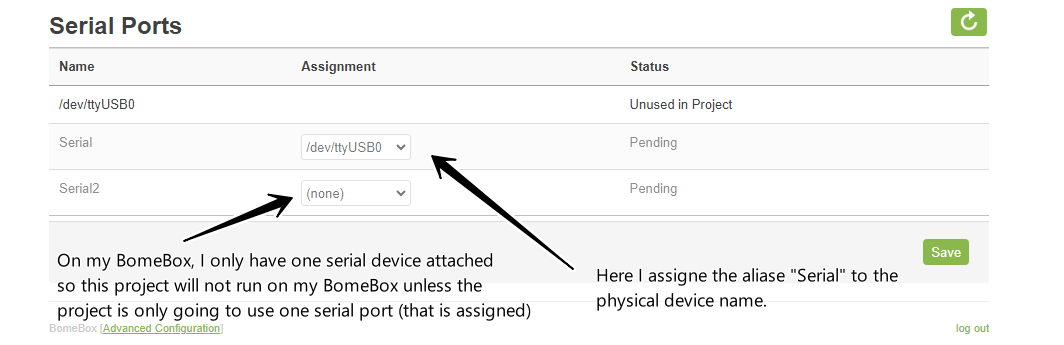
See my example below. Your project file should always communicate with the Alias and not the physical serial port name which as you pointed it will be different when moving between computers or BomeBoxes.
Steve Caldwell
Bome Customer Care
Also available for paid consulting services: bome@sniz.biz
thank you steeve, i sent a little explanatory video. i read somewhere that you have to use a hub and not connect the arduino directly to the bomebox that could be it. Thanks again.
bomebox.mov.zip (2.3 MB)
Update: I flagged some options on Midi Translator and in fact it works. However I’m having a new problem: when I use the robot directly with the Translator Pro on my Mac the default position is correct like in the first picture, when however I use it via Bome Box (same project) the initial position and consequently all the rest is like picture 2. Does this happen because the conversion speed is different with the two methods? I don’t want to update the firmware in the arduino with the position compatible with the Bome Box because it won’t be the same without the Bome Box. If you have some suggestions it would be wonderful.
ps the kraftwerk are alive again and became female ![]()


I’m not sure how your Arduino code works or how many rules that you have within your translators, however if the speed of the translators is different, it should still go to the correct position, but it might take a different amount of time to get there. BomeBox is usually as fast and sometimes faster than most computers as it has no other processing that needs to happen where computers are general purpose and can speed can be affected by other processes running on the computer.
Steve Caldwell
Bome Customer Care
Also available for paid consulting services: bome@sniz.biz
Thanks as always Steve. there are no particular rules in the translator, I only have a translator that assigns midi message note on on input and ‘serial port’ on output, that’s all. the robot is less responsive with the use of the boombox. I’m giving up for now. so I can make the conversion via pc. in the future I will see how to exploit the bomebox. by chance can you give some examples of fields of use of the bome box? I deal with electronic music and robotics indeed. thanks for the support. Good day
How are you controlling the robot? Do you have a MIDI controller directly connected to the BomeBox or or you using WiFi from another location? If using WiFi, did you set up your country correctly on BomeBox? It appears that it is being controlled from your computer over the WiFi network and if your WiFI country settings are not right then that could be cause a problem.
Steve Caldwell
Bome Customer Care
Also available for paid consulting services: bome@sniz.biz